-
이메일
yangli@goyojo.com
-
전화
18961848055
-
주소
상주시 노동서로 21호 2동 802호
밀랑드계기과학기술(강소)유한회사



개요
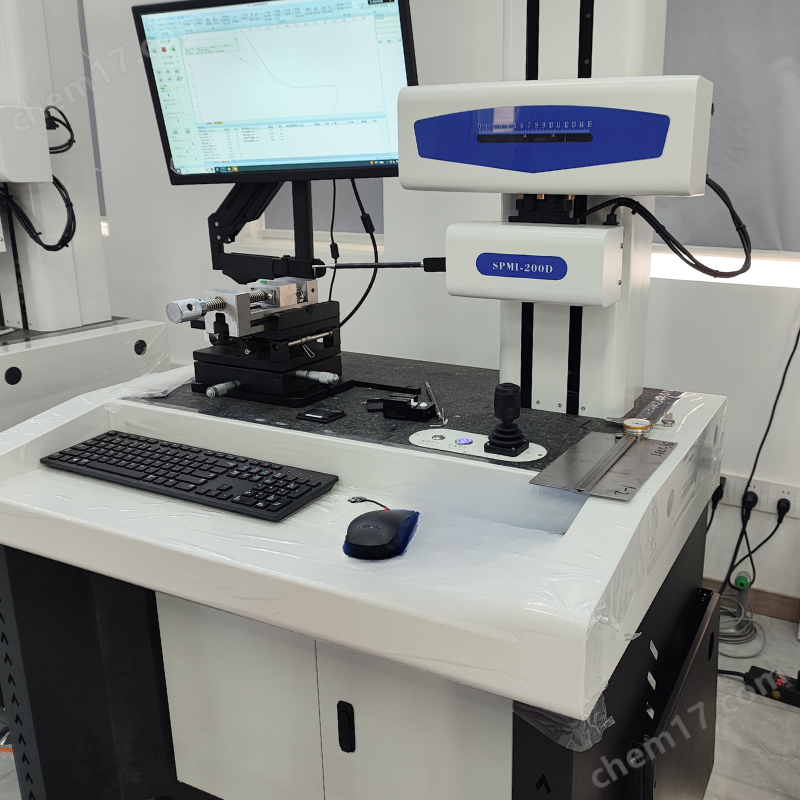
데스크탑 조잡도계 측정 원리는 직각 좌표 측정법이다. 즉 X축, Z1축 센서를 통해 측정된 부품의 표면 윤곽을 그린 좌표점을 측정하고, 전기 부품을 통해 센서가 측정한 좌표점 수를 상위 PC기로 전송한다. 소프트웨어는 수집한 원시 좌표 데이터를 수학 연산 처리하고, 필요한 공정 측정 항목을 표시한다
제품 정보
데스크탑 조잡도 측정기측정 원리는 직각 좌표 측정법, 즉 X축, Z1축 센서를 통해 측정된 부품의 표면 윤곽의 좌표점을 측정하고, 전기 부품을 통해 센서가 측정한 좌표점 수를 상위 PC기로 전송하며, 소프트웨어는 수집한 원시 좌표 데이터를 수학적으로 연산 처리하고, 필요한 공정 측정 항목을 표시한다
데스크탑 조잡도 측정기 측정 원리는 직각 좌표 측정법, 즉 X축, Z1축 센서를 통해 측정된 부품의 표면 윤곽의 좌표점을 측정하고, 전기 부품을 통해 센서가 측정한 좌표점 수를 상위 PC기로 전송하며, 소프트웨어는 수집한 원시 좌표 데이터를 수학적으로 연산 처리하고, 필요한 공정 측정 항목을 표시한다
장치 기술 성능:
1. 프로파일 측정 기능:
치수: 수평 거리, 수직 거리, 선형 거리, 반지름, 지름 포함
각도: 수평 각도, 수직 각도, 각도 포함
위치 공차: 평행도, 수직도 포함
형태 공차: 선도, 볼록도, 호 외곽선 포함
보조 생성: 보조 점, 안내선, 보조 원 포함
조잡도 분석:Ra, Ramax, Ramin, Rasd, Rp, Rpmax, Rpmin, Rpsd, Rv, Rvmax, Rvmin, Rvsd, Rz, Rzmax, Rzmin, Rzsd, R3z, Rc, Rcmax, Rcmin, Rcsd, Rt, Rq, Rqmax, Rqmin, Rdsd, Rsk, Rskmax, Rsmin, Rsksd, Rku, Rkumax, Rkumin, Rkusd, Rsm, Rsmmax, Rsmmin, Rsmsd, Rs, R△a、R△Amax, R△아민, R△ASD, R△q、R△qmax 및 R△qmin, R△qsd, Rk, Rpk, Rvk, Mr1, Mr2, Rλa, Rλamax, Rλamin, Rλasd, Rλq, Rλqmax, Rλqmin, Rλqsd, Rδc, Rpc, Rmr
파문도 분석:Wa, Wamax, Wamin, Wasd, Wsa, Wca, Wa08, Wc, Wcmax, Wcmin, Wcsd, Wt, Wz, Wzmax, Wzmin, Wzsd, Wp, Wpmax, Wpmin, Wpsd, Wv, Wvmax, Wvmin, Wcsd, Wq, Wqmax, Wqmin, Wqsd, Wsm, Wsmmax, Wsmmin, Wsmsd, Wsk, Wskmax, Wskmin,
Wsksd, Wku, Wkumax, Wkumin, Wkusd, W△q、W△QMAX, W△qmin, W△QSD, Wδc 및 Wmr
원본 프로파일 분석:Pa, Pt, Pp, Pc, Pv, Pz, Pq, Psm, Psk, Pku, RzJ, Rpq, Rvq, Rmq, Pmr, P△q, Avh, Hmax, Hmin, 지역, Pδc, Tilta,
(4). 장치 매개 변수:
측정 범위 |
X 방향드라이브 |
140.0mm |
|
Z1은 |
윤곽도 측정 거리 |
20mm |
|
Z1은 |
조잡도 측정 거리 |
±1500μm |
|
Z1은 |
해상도0.02 마이크로미터 |
||
Z축 높이 (기둥) |
400mm의 |
||
최소 내부 구멍 감지 가능 |
5mm |
||
프로파일 기술 매개변수 |
선형 정밀도 |
±(1.2+|0.12H|) μm |
|
호 |
±(1.2+ R / 12)μm |
||
각도 |
±1′ |
||
직선도 |
0.7μm/100mm |
||
조잡도 기술 파라미터 |
선형 정밀도 |
≤±5% |
|
잔존 잡음 |
≤0.005μm |
||
반복 안정성 |
시험 값3% |
||
마감 파장 |
0.025, 0.08, 0.25, 0.8, 2.5, 8mm |
||
길이 평가 |
λcX1, 2, 3, 4, 5 |
||
센서 |
칩 유형 |
미국 |
|
해상도 |
0.02μm |
||
원산지 |
미국 |
||
오르막 각도 |
상승77도, 87도 떨어져. |
||
조잡도 평가 매개변수 |
Ra, Rz, (Rmax, Ry), Rt, Rp, Rpm, Rz (jis), Rv, R3z, Rs m, Rsk, Rk, Rc, Rpk, Rvk, Mr1, Mr2 |
||
속도 측정 |
0.05-20mm/s |
||
Z축 속도 |
0.05-20mm/s |
||

